
1. Pengenalan teknologi mesin rajut melingkar
1. Pengenalan singkat tentang mesin rajut melingkar
Mesin rajut melingkar (seperti yang ditunjukkan pada Gambar 1) adalah alat yang menenun benang katun menjadi kain berbentuk tabung. Mesin ini terutama digunakan untuk merajut berbagai jenis kain rajut timbul, kain kaos, berbagai kain bermotif dengan lubang, dan lain-lain. Berdasarkan strukturnya, mesin ini dapat dibagi menjadi mesin rajut melingkar single jersey dan mesin rajut melingkar double jersey, yang banyak digunakan dalam industri tekstil.
 2. Persyaratan proses
2. Persyaratan proses
(1) Inverter harus memiliki ketahanan lingkungan yang kuat, karena suhu lingkungan kerja di lokasi relatif tinggi, dan kapas dapat dengan mudah menyebabkan kipas pendingin macet dan rusak, serta lubang pendingin tersumbat.
(2) Diperlukan fungsi operasi inching yang fleksibel. Tombol inching dipasang di banyak tempat pada peralatan, dan inverter harus merespons dengan cepat.
(3) Ada tiga kecepatan yang dibutuhkan dalam pengendalian kecepatan. Pertama adalah kecepatan operasi inching, biasanya sekitar 6Hz; kedua adalah kecepatan tenun normal, dengan frekuensi tertinggi hingga 70Hz; ketiga adalah operasi pengumpulan kecepatan rendah, yang membutuhkan frekuensi sekitar 20Hz.
(4) Selama pengoperasian mesin rajut melingkar, pembalikan dan rotasi motor dilarang keras, jika tidak, jarum pada alas jarum akan bengkok atau patah. Jika mesin rajut melingkar menggunakan bantalan satu fasa, hal ini tidak perlu dipertimbangkan. Jika sistem berputar maju dan mundur, hal ini sepenuhnya bergantung pada putaran maju dan mundur motor. Di satu sisi, perlu dilakukan pelarangan putaran balik, dan di sisi lain, perlu dilakukan pengereman DC untuk menghilangkan putaran.
3. Persyaratan kinerja
Saat menenun, bebannya berat, dan proses pergerakan/pemulaian harus cepat, yang membutuhkan inverter dengan frekuensi rendah, torsi besar, dan kecepatan respons yang cepat. Konverter frekuensi mengadopsi mode kontrol vektor untuk meningkatkan akurasi stabilisasi kecepatan motor dan keluaran torsi frekuensi rendah.
4. Pengkabelan kontrol
Bagian kontrol mesin rajut melingkar menggunakan mikrokontroler atau PLC + kontrol antarmuka manusia-mesin. Konverter frekuensi dikendalikan oleh terminal untuk memulai dan menghentikan, dan frekuensi diberikan oleh besaran analog atau pengaturan frekuensi multi-tahap.
Pada dasarnya ada dua skema kontrol untuk kontrol multi-kecepatan. Pertama, menggunakan analog untuk mengatur frekuensi. Baik itu untuk gerakan pelan (jogging) atau operasi kecepatan tinggi dan rendah, sinyal analog dan instruksi operasi diberikan oleh sistem kontrol; yang kedua adalah menggunakan konverter frekuensi. Pengaturan frekuensi multi-tahap terintegrasi, sistem kontrol memberikan sinyal peralihan frekuensi multi-tahap, gerakan pelan (jogging) disediakan oleh inverter itu sendiri, dan frekuensi gerakan cepat (jogging) diberikan oleh nilai analog atau pengaturan digital dari inverter.
2. Persyaratan di lokasi dan rencana pengoperasian
(1) Persyaratan di lokasi
Industri mesin rajut melingkar memiliki persyaratan yang relatif sederhana untuk fungsi kontrol inverter. Umumnya, inverter dihubungkan ke terminal untuk mengontrol start dan stop, frekuensi analog diberikan, atau multi-speed digunakan untuk mengatur frekuensi. Operasi inching atau kecepatan rendah diperlukan untuk kecepatan tinggi, sehingga inverter diperlukan untuk mengontrol motor agar menghasilkan torsi frekuensi rendah yang besar pada frekuensi rendah. Umumnya, dalam aplikasi mesin rajut melingkar, mode V/F dari konverter frekuensi sudah cukup.
(2) Skema debugging Skema yang kami gunakan adalah: Inverter vektor arus tanpa sensor seri C320 Daya: 3,7 dan 5,5KW
3. Parameter dan instruksi debugging
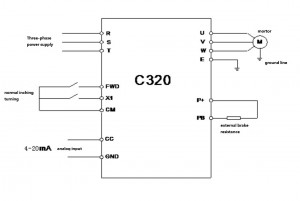
1. Diagram pengkabelan
2. Pengaturan parameter debug
(1) F0.0=0 mode VF
(2) F0.1=6 frekuensi saluran input sinyal arus eksternal
(3) F0.4=0001 Kontrol terminal eksternal
(4) F0.6=0010 pencegahan rotasi terbalik berlaku
(5) F0.10=5 waktu percepatan 5S
(6) F0.11=0.8 waktu perlambatan 0.8S
(7) F0.16=6 frekuensi pembawa 6K
(8) F1.1=4 Peningkatan torsi 4
(9) F3.0=6 Atur X1 ke jog ke depan
(10) F4.10=6 atur frekuensi jog ke 6HZ
(11) F4.21=3.5 Tetapkan waktu akselerasi jog menjadi 3.5S
(12) F4.22=1.5 menetapkan waktu deselerasi jog menjadi 1.5S
Catatan Debugging
(1) Pertama, jog untuk menentukan arah motor.
(2) Mengenai masalah getaran dan respons lambat saat jogging, waktu percepatan dan perlambatan jogging perlu disesuaikan sesuai kebutuhan.
(3) Torsi frekuensi rendah dapat ditingkatkan dengan menyesuaikan gelombang pembawa dan peningkatan torsi.
(4) Kapas menyumbat saluran udara dan kipas macet, menyebabkan pembuangan panas inverter menjadi buruk. Situasi ini sering terjadi. Saat ini, inverter umum mengabaikan alarm termal dan kemudian secara manual membersihkan serat kapas di saluran udara sebelum melanjutkan penggunaannya.
Waktu posting: 08-Sep-2023